

加工精度とは、加工後の部品の実際の幾何学的パラメータ(サイズ、形状、位置)が図面で指定された理想的な幾何学的パラメータにどの程度一致するかを指します。 適合度が高いほど、加工精度が高くなります。
機械加工では、さまざまな要因の影響により、パーツのすべての幾何学的パラメータを理想的な幾何学的パラメータに正確に一致させることは実際には不可能であり、常にある程度の偏差があります。 この偏差は加工誤差です。
次の3つの側面から探索します。
- 部品の寸法精度を取得する方法
- 形状精度の取得方法
- 位置精度の取得方法
1.部品の寸法精度を取得する方法
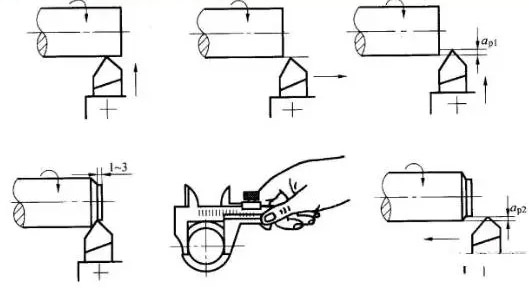
(1)トライアルカット法
つまり、最初に加工面の小さな部分を切り取り、テストカットのサイズを測定し、加工要件に従ってワークピースに対するツールの刃先の位置を調整してから、カットを試みます。 そして、測定しますので、2、3回の試行カットと測定の後、サイズが要件を満たした後に処理されたら、加工する表面全体をカットします。
トライアルカット方式は「トライアルカット・測定・調整・トライアルカット再試行」で、必要な寸法精度に達するまで繰り返します。
トライアルカット法で達成される精度は非常に高い場合があります。 複雑な装置は必要ありませんが、この方法は時間がかかり(複数の調整、トライアルカット、測定、計算が必要)、効率が低く、作業者のスキルレベルと測定器の精度に依存します。 品質が不安定なため、単品小ロット生産にのみ使用されます。
トライアルカット方法の一種であるマッチングは、処理されたパーツ、別のマッチングワークピースの処理、または2つ(またはそれ以上)のワークピースを組み合わせて処理することに基づいています。 マッチング作業での最終加工サイズの要件は、機械加工部品とのマッチング要件に基づいています。
(2)調整方法
サンプルまたは標準部品を使用して、工作機械、固定具、切削工具、およびワークピースの正確な相対位置を調整し、ワークピースの寸法精度を確保します。 サイズは事前に調整されているため、加工中に再度切削を行う必要はありません。 サイズは自動的に取得され、パーツのバッチの機械加工中に変更されません。 これが調整方法です。 たとえば、フライス盤の固定具を使用する場合、工具の位置は工具ブロックによって決定されます。 調整方法の本質は、工作機械またはプリセット工具ホルダーの固定距離装置または工具設定装置を使用して、工具を工作機械または固定具に対して特定の位置精度に到達させてから、 ワークピースのバッチ。
また、ダイヤルに合わせて工具を送り、工作機械でカットする調整方法の一種です。 この方法では、トライアルカット法に従って文字盤の目盛りを決定する必要があります。 大量生産では、固定範囲ストッパー、試作品、テンプレートなどの工具設定装置が調整によく使用されます。
調整方法は、トライアルカット方法よりも加工精度と安定性に優れ、生産性も高くなっています。 高度な工作機械オペレーターを必要としませんが、工作機械アジャスターの要件が高く、バッチ生産や大量生産でよく使用されます。
(3)固定サイズ方式
対応する工具サイズを使用して、加工するワークのサイズを確保する方法をサイジング法と呼びます。 加工には標準サイズの工具を使用し、加工面のサイズは工具サイズによって決まります。 つまり、一定の寸法精度の工具(リーマ、リーマ、ドリルなど)を使用して、ワークピース(穴など)の精度を確保します。
サイジング方法は操作が簡単で生産性が高く、加工精度が比較的安定しています。 それは労働者の技術レベルとはほとんど関係がありません。 生産性が高く、さまざまな生産に幅広く使用されています。 たとえば、穴あけ、リーマなど。
(4)アクティブ測定方法
加工工程では、加工中に加工寸法を測定し、測定結果を設計に必要な寸法と比較した後、工作機械を稼働させ続けるか、工作機械を停止することができます。 これがアクティブな測定方法です。
現在、アクティブ測定の値はデジタルで表示できます。 アクティブ測定法は、測定装置をプロセスシステムに追加し(つまり、工作機械、切削工具、固定具、およびワークピースの統合)、5番目の要素になります。
アクティブ測定法は、開発の方向性である安定した品質と高い生産性を備えています。
(5)自動制御方式
この方法は、測定装置、供給装置、および制御システムで構成されています。 測定、供給装置、制御システムを自動処理システムに統合し、システムによって機械加工プロセスが自動的に完了します。
サイズ測定、工具補正調整、切削加工、機械停止などの一連の作業が自動的に完了し、必要なサイズ精度が自動的に達成されます。 たとえば、CNC機械で加工する場合、部品はプログラムのさまざまな命令によって制御され、加工シーケンスと加工精度を制御します。
初期の自動制御方法は、アクティブ測定と機械的または油圧制御システムを使用して完了しました。 現在、処理要件に応じて事前に準備されたプログラムが広く使用されています。 制御システムが発行する工作機械を制御するプログラム、または制御システムが発行するデジタル情報命令を実行するデジタル制御工作機械で、加工中の加工条件の変化に適応し、加工量を自動調整して最適化を実現するプログラム 指定された条件に従った機械加工プロセスの。 適応制御工作機械は自動制御処理を行います。
自動制御方式は、安定した品質、高い生産性、優れた加工の柔軟性、そして機械製造の現在の開発方向であり、コンピュータ支援製造(CAM)の基礎である多種多様な生産への適応性を備えています。
2.形状精度の取得方法
(1)軌道法
この加工方法は、工具先端の動きの軌跡を利用して、加工面の形状を形成します。 通常の旋削、フライス加工、平削り、研削はすべて工具先端パス法に属します。 この方法で得られる形状精度は、主に成形動作の精度に依存します。
(2)成形方法
成形工具の形状を使用して、工作機械の特定の成形動作を置き換え、加工面の形状を取得します。 成形旋削、フライス加工、研削など。 成形方法で得られる形状精度は、主に刃の形状に依存します。
(3)生成方法
工具とワークで形成されたエンベロープ表面を使用して、歯車のホブ切り、歯車の成形、歯車の研削、ローレットスプラインなどの加工面の形状を生成します。これらはすべて生成方法です。 この方法で得られる形状精度は、主にブレードの形状精度と生成運動精度に依存します。
3.位置精度を取得する方法
機械加工では、他の表面上の加工面の位置の精度は、主にワークピースのクランプによって決定されます。
(1)正しいクランプを直接見つける
この方法は、ダイヤルゲージ、マーキングプレート、または目視検査を使用して、工作機械上のワークピースを直接見つけることです。
(2)正しい取り付けクランプを見つけるために線を引きます
この方法は、まず部品図に従ってブランクに加工する各面の中心線、対称線、加工線を描き、次に工作機械にワークを取り付けます。 描かれた線に従って工作機械のワークのクランプ位置を合わせます。
このクランプ方法は、生産性が低く、精度が低く、作業者の技術的要件が高くなります。 これは一般に、少量のバッチ生産で複雑で重い部品を処理する場合、またはブランクサイズの公差が大きく、固定具で直接クランプできない場合に使用されます。
(3)クランプによるクランプ
フィクスチャは、機械加工プロセスの要件に従って特別に設計されています。 フィクスチャの位置決め要素は、工作機械および切削工具に対するワークピースの正しい位置をすばやく占めることができます。 位置合わせなしでワークの位置決め精度を確保でき、治具によるクランプ生産性が高い。 位置決め精度は高いですが、バッチ生産や大量生産で広く使用されている特殊な器具を設計・製造する必要があります。